ФИНАЛЬНАЯ РАСПРОДАЖА
ПОЖИЗНЕННЫЙ VIP-ДОСТУП на CarMasters
Полный безлимит
Прошивки, дампы и схемы без ограничений
Прошивки, дампы и схемы без ограничений
Закрытый софт
Приватный софт, утилиты и отломы
Приватный софт, утилиты и отломы
Зарубежные каталоги
Ремонтные базы и электросхемы
Ремонтные базы и электросхемы
База знаний 24/7
Готовые решения чип-тюнинга и IMMO
Готовые решения чип-тюнинга и IMMO
VIP-поддержка
Помощь мастеров и администрации
Помощь мастеров и администрации
Один платеж
Забудьте о регулярных подписках
Забудьте о регулярных подписках


chuckha
-
Постов
20 -
Зарегистрирован
-
Посещение
Информация о chuckha

Посетители профиля
367 просмотров профиля





Достижения chuckha
Пользователь (2/3)
6
Репутация
-
 11den11 отреагировал на сообщение в теме:
Тестер цифровых реле регуляторов
11den11 отреагировал на сообщение в теме:
Тестер цифровых реле регуляторов
-
zkf отреагировал на сообщение в теме:
Тестер цифровых реле регуляторов
-
Чем вам ответить? Закон Мёрфи «Если что-то может пойти не так, оно пойдёт не так» перефразирую "то что должно было случиться случилось" Никогда не ориентировался и не ждал оценок со стороны по той самой причине что вы описываете (жизненный опыт). Этот прибор очень специфичный хотя очень примитивный, особенно протокол и он даже не всех автоэлектриков интересует а так как я заработать не смогу то поступил в точности на оборот " Что не съем то отдам". Ну и чисто из интереса обращаюсь к форумчанам, если вам эта тема пошла на пользу можете накидать сюда смайлов или лайков не знаю что там блогеры обычно просят
- 159 ответов
-
- 2
-
-
- тестер
- регулятор-напряжения
- (и ещё 1 )
-
Про жизненный опыт можете не рассказывать и с самооценкой у меня всё в порядке (жизненный опыт). Моя мотивация? Лучше наверное ответят люди те кто на Github делятся своими проектами.
-
Спрашиваете "Как там?" в ообщем, в последнее время у нас тут в "райском саду" отвечают что на букву "Х" и приходится переспрашивать а заканчивается эта "Х" на "во" или "шо" ( шутка не сочтите за оскорбление) а про теорему Эрроу отвечу другой шуткой " чукча не мудри ты пальцем покажи". Ну а моя мотивация, что хотел и что получил? Люди тратят много времени на бесполезные вещи а для меня это забава, развлечение получил удовольствие, один человек даже сказал спасибо.
-
11den11 отреагировал на сообщение в теме:
Тестер цифровых реле регуляторов
-
Спасибо за поправку, в коде всё что найдёте с цифрами 4800 можете заменить на 2400 но скажу что мне такие устройства(генераторы) не поподались или я возможно не придал значения, ещё хочу сказать про энкодер, красиво и удобно крутить одной рукой но это ещё тот геморой с отладкой что бы чёто работал, так что можно всё сделать на кнопках тем более никаких глобальных переделок. На дисплее выведенно много информации можете ненужные строки закомментировать.
-
Приветствую всех, вот выкладываю файлы, приглашаю в телеграмм для обсуждения и доработки "народного тестера" файлы лежат тут https://github.com/Dynastarter/LIN-Alternator-Tester, телеграмм для обсуждения https://t.me/dynastarter
- 159 ответов
-
- 1
-
-
- тестер
- регулятор-напряжения
- (и ещё 1 )
-
Спасибо
-
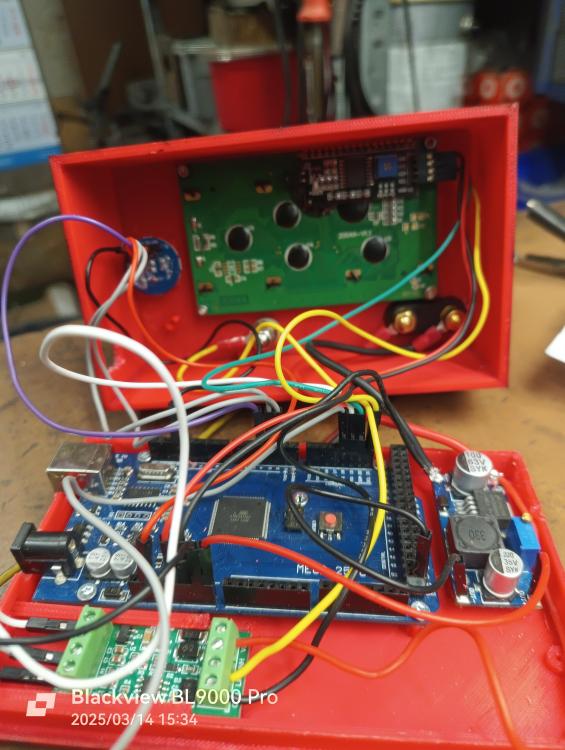
Приветствую всех, я не сценарист , режисёр и артист но как смог снял одной рукой на телефон демонстрацию того что прибор работает, если есть желание можете посмотреть https://www.youtube.com/watch?v=kj4xf7QOMg0
-
Нет, но что то на подобии есть желание сделать, я предлогал ему подкинуть свой проект но он отказался, сказал твой проект сам и делай вот и буду теперь раскачиватся а я по натуре конечно не полный но итроверт Хочу добавить что бы небыло недопониманий что прибор работает только с генераторами по LIN шине, и вообще первоначальная моя задача стояла работа со СтартСтоп iSTARS Valeo агрегатом
-
Так как мне тут в ближайшем окружении особо продовать не кому да и проект хоть и рабочий но далёк от совершенства есть желание в рамках " народности" выложить проект в открытый доступе что бы каждый по возможности мог сделать вклад и он остовался общедоступным, как пример "НАРОДНАЯ КОНТРОЛЬКА". Видео работы прибора я сниму и выложу но вот настройки сайта или GITHUB это займёт время пока разберусь и будет мотивация Неволнуйтесь вы же знаете что я не болтаю почём зря а так скажу номер два на массу
-
Здравствуйте, Продать прибор нет возможности так как живу в " цветущем райском саду" Что вы хотите знать? Про устройство, работает с генераторами по шине LIN а так же и с StartStop iSTARS VALEO, определяет управляет напряжением, запускает его как стартер
-
ivan34 отреагировал на сообщение в теме:
Тестер цифровых реле регуляторов
-
lbotos отреагировал на сообщение в теме:
Тестер цифровых реле регуляторов
-

- 159 ответов
-
- 2
-
-
- тестер
- регулятор-напряжения
- (и ещё 1 )
-
думаю что разберёшся https://github.com/sherzaad/LIN
-
Вас наверное в понедельник родили, так усердно пытаетесь доказать что вы Хам, может хотите получить звание Хам в квадрате или в кубе. Это технический форум а не какой то чат маил.ру, там находятся диванные войска и можете поливать всех дерьмом. Если вы технарь так и ведите себя как образованный человек. Хотя о чём я тут пишу вы же человек из той породы " прав или не прав но моё слово последнее или как всегда в очередной раз я оказался прав" . Лейте дальше гадости, не вижу больше смысла вам отвечать а то задавите своим богатым профессиональным опытом в этой области.
-
Реклама и волки Похоже что вы плохой читатель но очень хороший писатель. Я то как раз хорошо тут всё прочитал и как только здесь снова подымают тему так вас аж на изнанку выворачивает.
-
Похоже что вы плохой читатель но очень хороший писатель. Я то как раз хорошо тут всё прочитал и как только здесь снова подымают тему так вас аж на изнанку выворачивает, какай то личный интерес имеете чтоб тема совсем завяла. Не я вспомнил сообщения месячной давности а вы. Всего хорошего вам, надеюсь мы позабавили местную публику своим срачем.